技术信息
- 技术信息
- 专业术语
专业术语
术语解释
开关中使用的一些术语在 KS 中定义,但它们也包括通用术语,解释如下。
一般术语
| 微动开关 | 它是指具有微小接触间隙和速动机构的小型开关,其以指定的运动和力打开和闭合的接触机构包含在壳体内,并在外部配备执行器。(以下简称开关) |
|---|---|
| 限位开关 | 这是指组装在金属外壳或树脂外壳中以保护其免受外力、水、油、灰尘等影响的微动开关。 |
| 额定值 | 一般是指作为开关特性和性能保证标准的量,如额定电流、额定电压,并受一定的条件限制。 |
| 接触点 | 在开关的种类中,是指依靠触点的机械打开和闭合而具有开关功能的开关。 |
| 触点类型 | 它由根据各种用途的触点的电气输入/输出电路组成。 |
| 树脂附着力(模具端子) | 这意味着端子部分用引线接线,然后用树脂填充以固定该部分,消除了暴露的填充部分并提高了填充性能。 |
寿命条款
| 机械寿命 | 这是指通过将操作后的移动(OT)设置为指定值而在非通电状态下的开关寿命。 |
|---|---|
| 电气寿命 | 这是指将动作后的动作(OT)设定为规定值时,额定负载(阻性负载)下的开关寿命。 |
结构术语
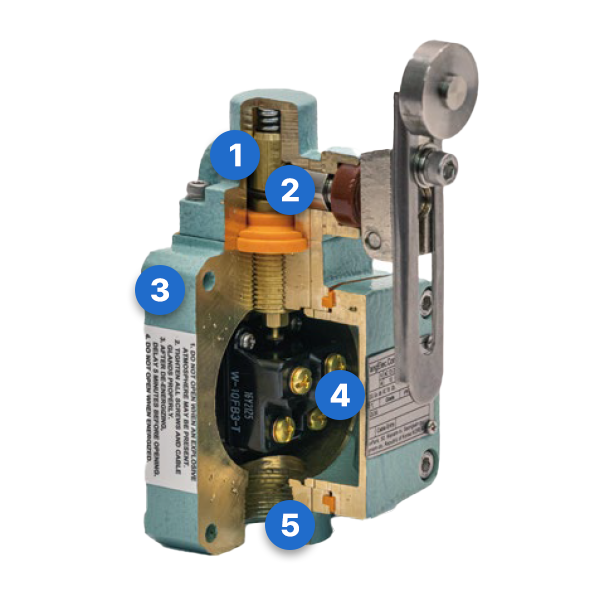
- 一头头
- 对于限位开关来说,操作机构是指具有独立机构的部分。
- 2操作部分执行器
- 作为开关的一部分,是指将施加在执行器上的外力传递到内部弹簧机构,使动触点移动,从而打开和关闭开关的机构。
- 3案件案件
- 是指保护开关机械部分的本体,也称外壳。
- 4转变转变
- 它通过接收来自开关操作部分和头部的线性运动来机械地打开和关闭接触点来执行开关功能。
- 5导管端口导管
- 特别是限位开关的情况下,是指接线孔,接线部分的密封就是在该部分进行的。
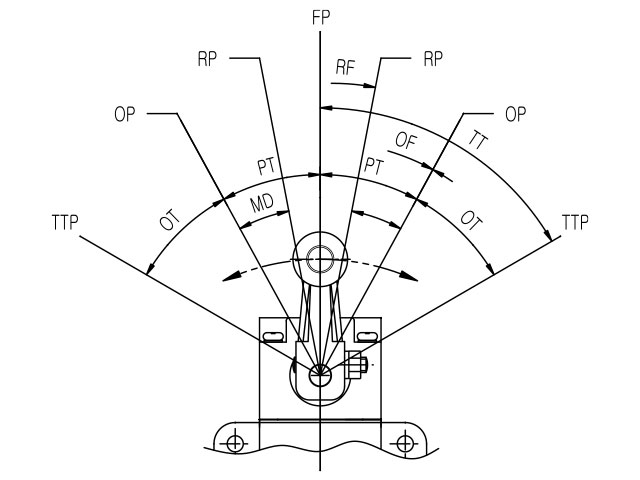
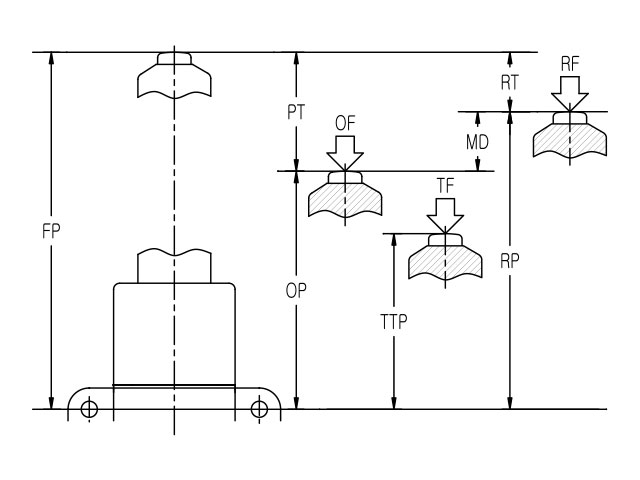
与操作特性相关的术语
| 分类 | 条款 | 缩写 | 单元 | 正义 |
|---|---|---|---|---|
| 力量 | 操作 力 | 的 | g、kg g-mm | 施加到执行器上从自由位置 (FP) 移动到操作位置 (OP) 所需的力 |
| 释放力 _ | 射频 | 施加到执行器上从操作极限位置 (TTP) 移动到返回位置 (RP) 所需的力 | ||
| 总行程 力 | TF | 施加到执行器上从操作位置 (OP) 移动到操作极限位置 (TTP) 所需的力 | ||
| 移动 | 移动直至行动 (行进前) | PT | 毫米,° | 从执行器的自由位置(FP)到操作位置(OP)的移动距离或移动角度 |
| 一次又一次的运动 (超程) | 奥特 | 从执行器的动作位置(OP)到动作极限位置(TTP)的移动距离或移动角度 | ||
| 运动 差速器 | 医学博士 | 从执行器的动作位置(OP)到返回位置(RP)的移动距离或移动角度 | ||
| 总 行程 | TT | 从执行器自由位置(FP)到动作极限位置(TTP)的移动距离或移动角度 | ||
| 地点 | 自由位置 _ | FP | 毫米,° | 无外力作用时操作部分的执行器位置 |
| 操作 位置 | OP | 当对执行器施加外力时,执行器的位置与可动触点正好从自由位置(FP)状态反转。 | ||
| 释放 位置 | RP | 当执行器的外力减小,可动触点正好从操作位置(OP)状态反转到自由位置状态(FP)时执行器的位置。 | ||
总行程位置 | TTP | 执行器到达停止位置时的位置 |
- 庆尚南道昌原市城山区完岩路50号,SK科技园科技洞718号
- 电话 +82-55-263-8539
- 传真 +82-55-262-8539
- 电子邮件 syeclz@naver.com
Copyright ⓒ SHINYANG Elec. com. All Rights Reserved. Designed by Creative MARU